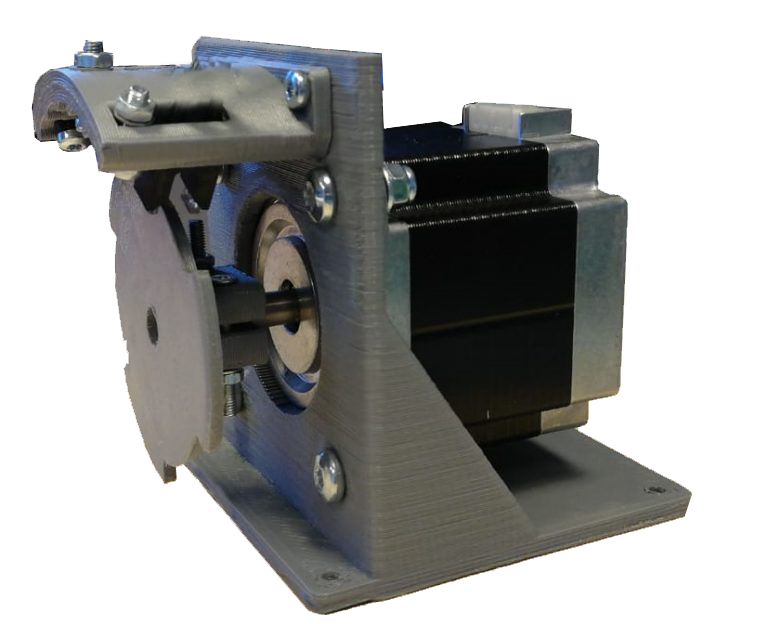
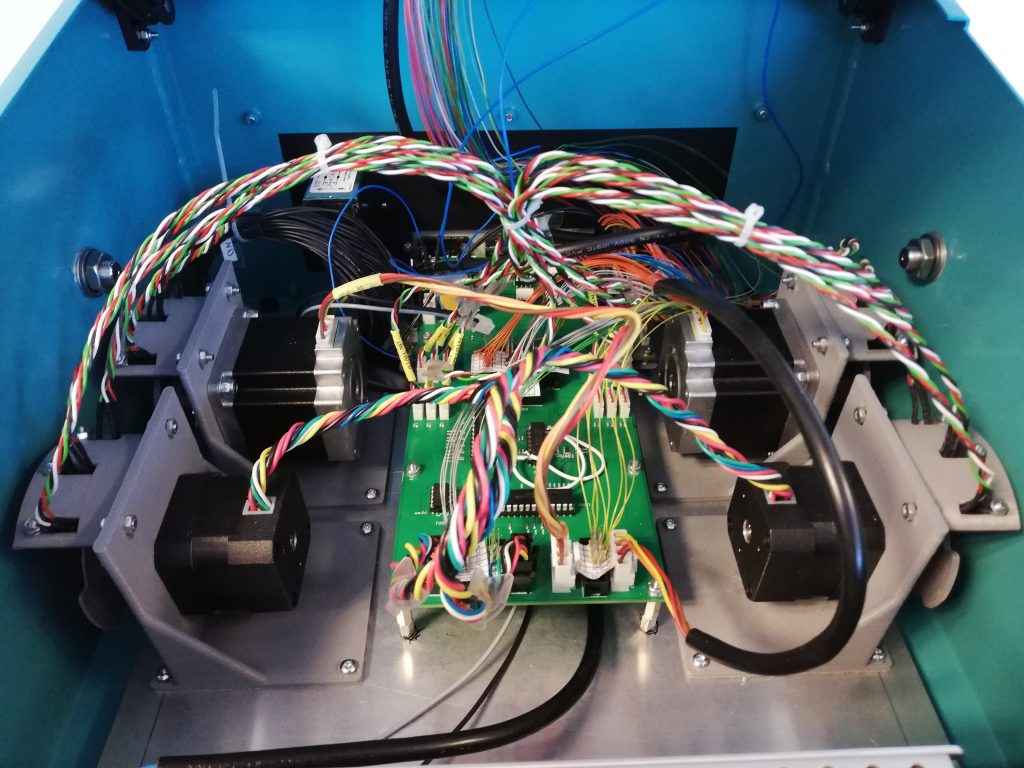
The motor driver board is an additional board to an ARM-CPU board. So we used that board to test it. We try to meet the test conditions as close as possible with the clients application. For the motor driver board we used the original motors of the end use.
On the ARM-CPU board runs a customized Yokto Linux witch means we needed to develop software with the corresponding SDK. The test software is developed in C programming language to have direct access to the hardware.
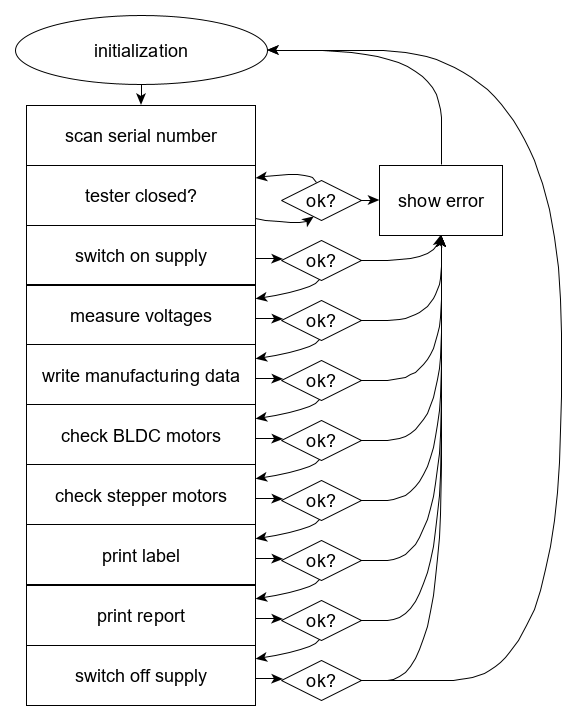
On the right side you can see a simplefied schematic how the software works in general.
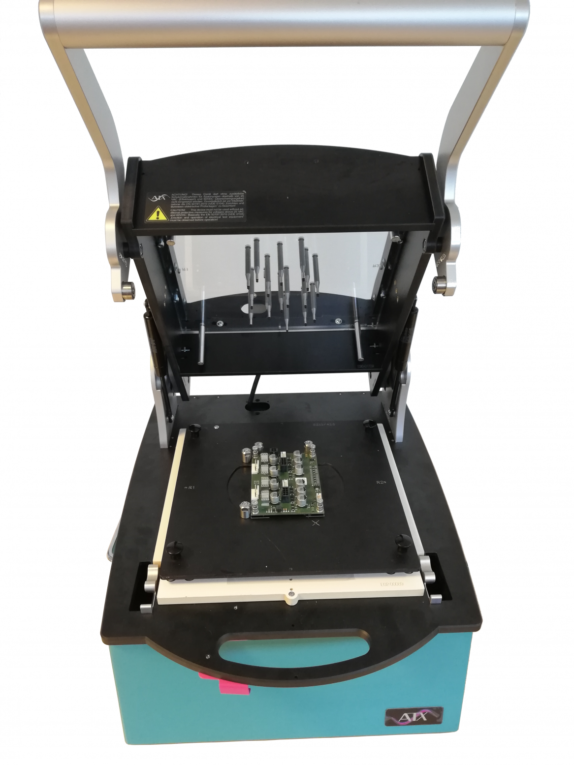
First all data structures will be initialized to make sure that no data from the last device under test is used. After that the software is wating for closing the test adapter. And here comes the automation. All interfaces will be checked in a state machine – one after another. At the end a label will be printed in case the test was successful.